

| Таснифот | Номи таҷҳизот | Модел | Миқдор | Шарҳ |
|---|---|---|---|---|
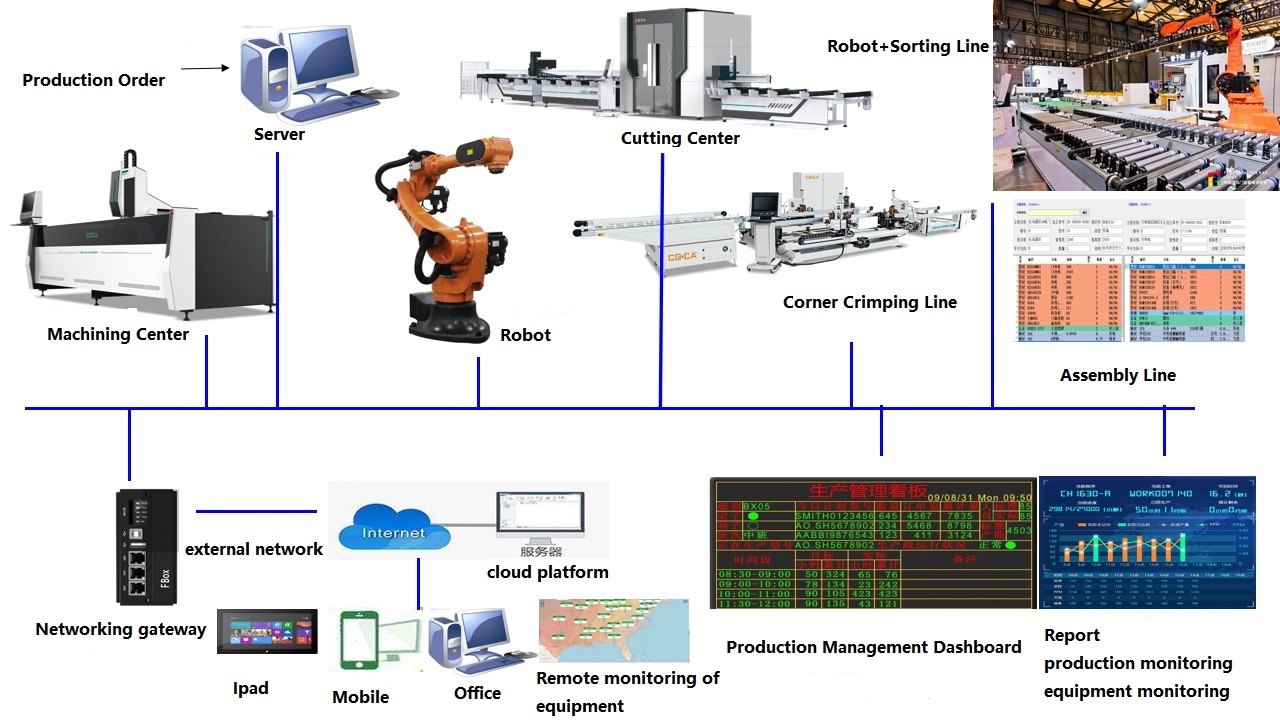
| Таҷҳизоти коркарди интеллектуалӣ барои дарҳо ва тирезаҳо | Истгоҳи кории арракунӣ ва фрезеркунии интеллектуалии баландсуръат (навъи онлайн) | HSM150-L | 1 | 1. Вазифаи хонагии мувозӣ дар се самти корӣ; 2. Кандакорӣ бо лазер дар тарафи пеш, пармакунӣ ва фрезеркунӣ + кандакорӣ бо лазер дар тарафи қафо, буридани сӯрохиҳо, пармакунӣ ва фрезеркунӣ + Фрезеркунии боло ва поён + буриши кунҷи худсарона + пармакунӣ ва фрезеркунии сӯрохиҳои сӯзан ва сӯрохиҳои тазриқӣ |
| Платформаи ҷойгиркунии дар ва тирезаҳои алюминий | LDWT01-3200 | 1 | Ба робот дар дарк кардани маводҳо кӯмак кунед, то боварӣ ҳосил кунед, ки ҳар се сатҳи коркард кушодаанд | |
| Мошини фрезеркунии нӯги дукаратаи CNC интеллектуалӣ | E75-D | 1 | Сервои 5-меҳвари дуқабата, HCFA, версияи идоракунии саноатӣ, муҳофизати пӯлоди зангногир бо роҳи оҳани роҳнамои меҳвари X 201 | |
| Хатти ҷудокунии интеллектуалӣ (хати асосӣ + хатти ёрирасон) | 4000*400/5000*400мм | 1 | Аз ҷумла консоли идоракунӣ, камераи сканеркунии баландсифат, шкафи тақсимкунӣ, табақи кабелӣ ва дигар таҷҳизоти ёрирасон | |
| Роботи ҚАДАМ | SB50-2180 | 1 | 1. Истифодаи маркази пармакунӣ ва фрезеркунӣ барои интихоб ва ҷойгир кардани қисмҳои корӣ; 2. Роботи баландсуръати Шанхай Синшида (аз ҷумла пойгоҳи собит, асбоби пневматикӣ, барномаи амалиётӣ ва пардохти яксолаи нигоҳдорӣ); 3. Аз ҷумла 1 истгоҳи буферӣ | |
| Пойгоҳи робот + арматураи пневматикӣ + мизи буферӣ | - | 1 | ||
| Аломати электронии ҷудокунии мошинҳои боркаши 21 дюймӣ | - | 1 | Консол + монитор + гузариши идоракунии саноатӣ, идоракунии таснифоти масолеҳи тайёрро дар охири хати истеҳсолӣ анҷом диҳед | |
| CGMA Wendao - Платформаи нармафзори истеҳсоли дар ва тиреза | Нармафзори системаи V2.0 MES | 1 | 1. Вазифа: Мониторинги вақти воқеӣ аз кори таҷҳизоти гуногун дар хатти истеҳсолӣ, истихроҷи маълумоти коркард аз ҳар як истгоҳи корӣ ва ҳамкории инсон ва компютер ва ғайра; 2. 1 калиди идоракунии саноатӣ, 1 экрани намоиши 65 дюймӣ ва сими шабакавӣ ва ғайраро танзим кунед; | |
| Аломати электронии 65 дюймӣ | - | 1 | ||
| Ҷамъ | 9 | - | ||

